Drone Racing: 210 Build
Why did I wait so long? Drones, a mesh of some of my favorite technologies in one.
This should have been a no-brainer. It took the interest of my boys to make me realize how much fun this sport is. Yes, I said “sport”, With drone advancements and growing interested even ESPN had declared Drone racing a sport.
With advancements moving so fast and regulations struggling to keep up. We are seeing big companies like amazon with PrimeAir looking to deliver by air. To start up's like Zipline delivering medicine in Rwanda and insurance agency looking to take HD photography from the sky to document an insurance claims with Airware. To Hollywood, right here in LA the scene is blowing up with companies popping up all over the place to take aerial videography for movies and advertising. In the past, you had to hire a helicopter, a pilot and the right equipment to get that right shot, and this was costly now you get the same shot for a fraction of the price using these companies. With and idea one where we are now, where do you think we will be in 10years?
We picked up my oldest son for his 11th birthday a Hubsan FPV x4 and he is loving it. My other son who is 10 years old was equally excited. He used his own money to pick himself up a Hubsan x4 as well.
So I decided to use my son’s interest and curiosity of racer drones into building one. My hope is their curiosity will make them want to dive further into how things work on the inside and open new doors to them.
This project will not be like previous ones as I will be taking my time to explain and teaching my sons as we explore where our curiosity take us.
I have received some interest in this project and have created this page so you can follow and become part of the journey with us, through wire diagrams, soldering, parts lists, tutorials are videos. Unlike past articles where we break into parts, we are going to continue and keep everything here. Making it easy long term for everyone. Bookmark and keep an eye out for updates.
This page is subject to lots of changes during the build process as we learn and grow.





Parts List
- Frame: Speed Addict 210-R FPV (Final)
- Motor: Xnova 2204-2600kv (Final)
- Electronic Speed Controller: DYS XM20A V2 ESC (Final)
- Universal ESC Programmer: Speed addicts ESC Programmer (Final)
- Power Distribution Board: Speed Addict FPV PDB (Final)
- Flight Controller: Naze32 - V5 or DoDo
- Spectrum Satellite Receiver: Lemon RX DSMX Satellite Receiver
- FPV Receiver: Hawkeye 600mW FPV Video Transmitter
- FPV Camrea: Foxeer HS1177 FPV Camera
- FPC Antenna: TBS Triumph 5.8GHz CP FPV Antenna
- Buzzer:
- Batteries: Tattu 1550MAH 4S1P 75C Lipo XT60

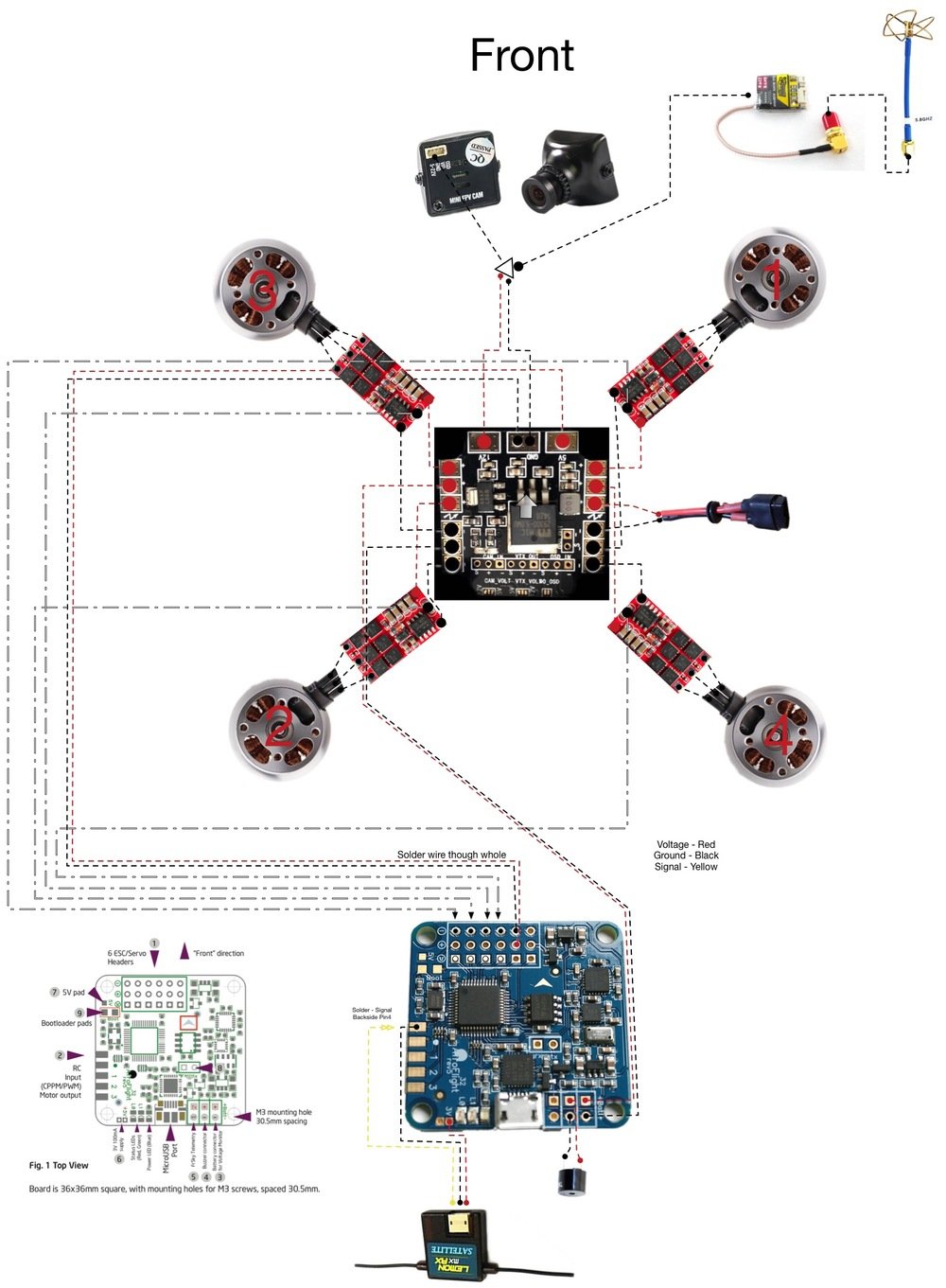
Wire Diagram
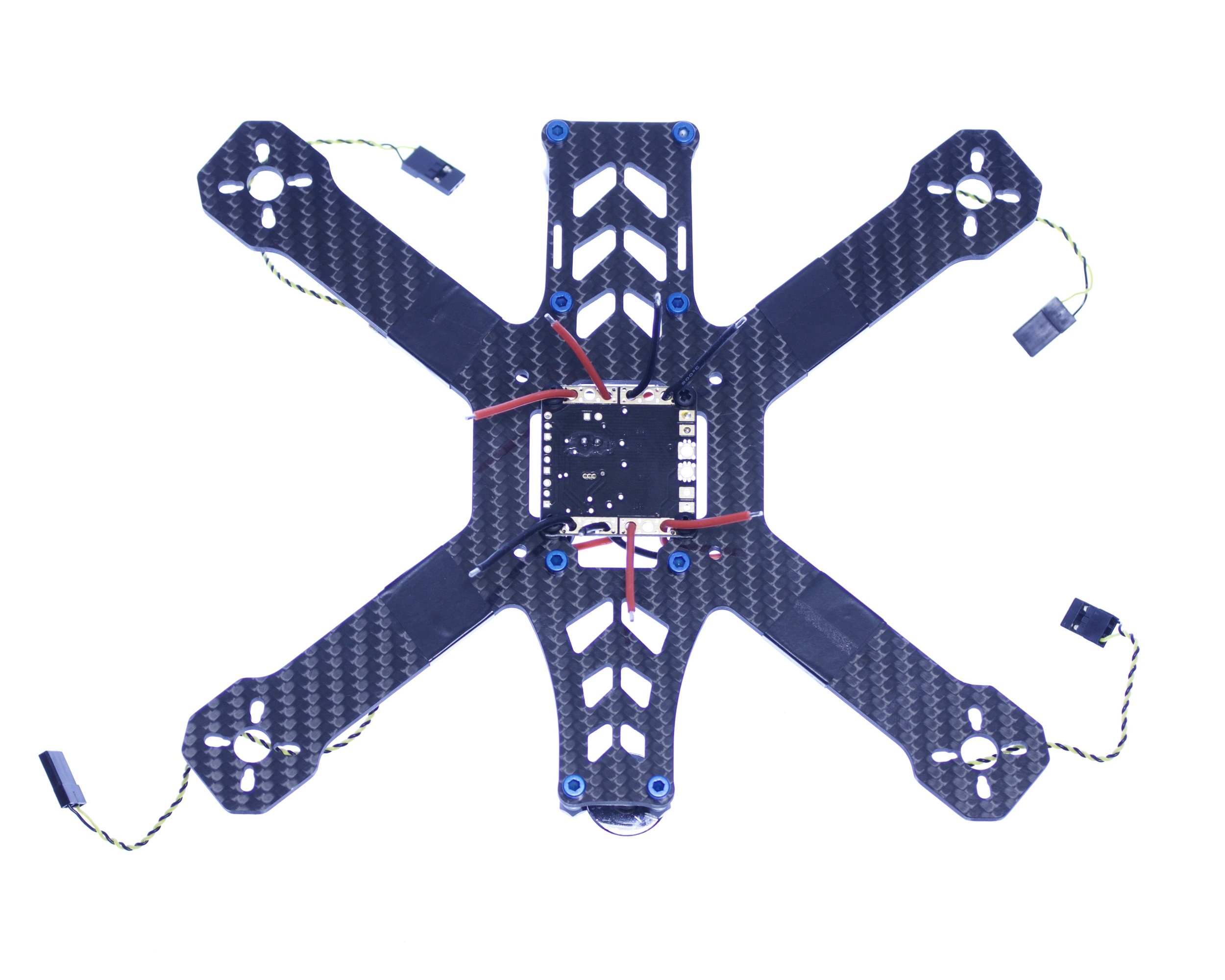
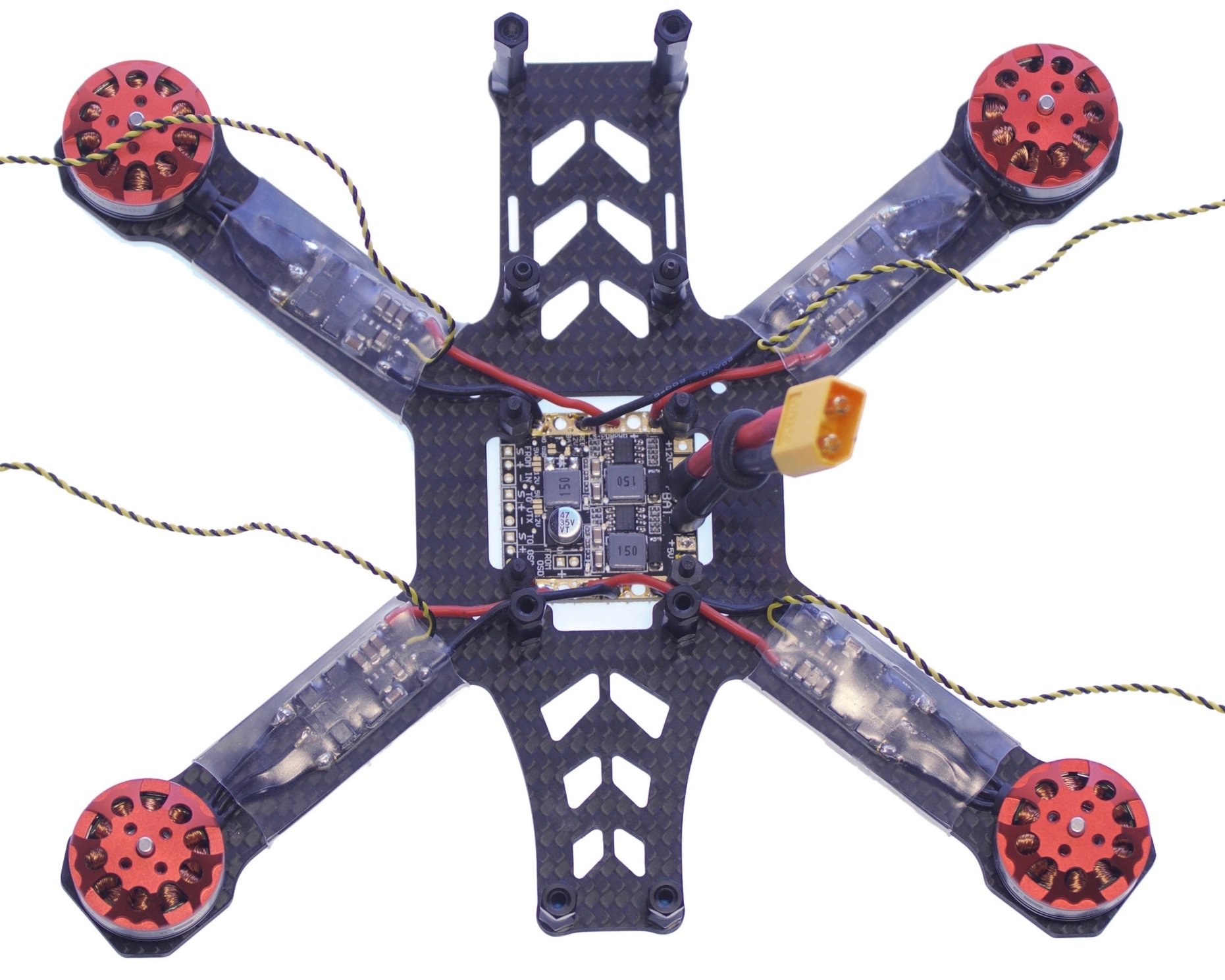
Frame
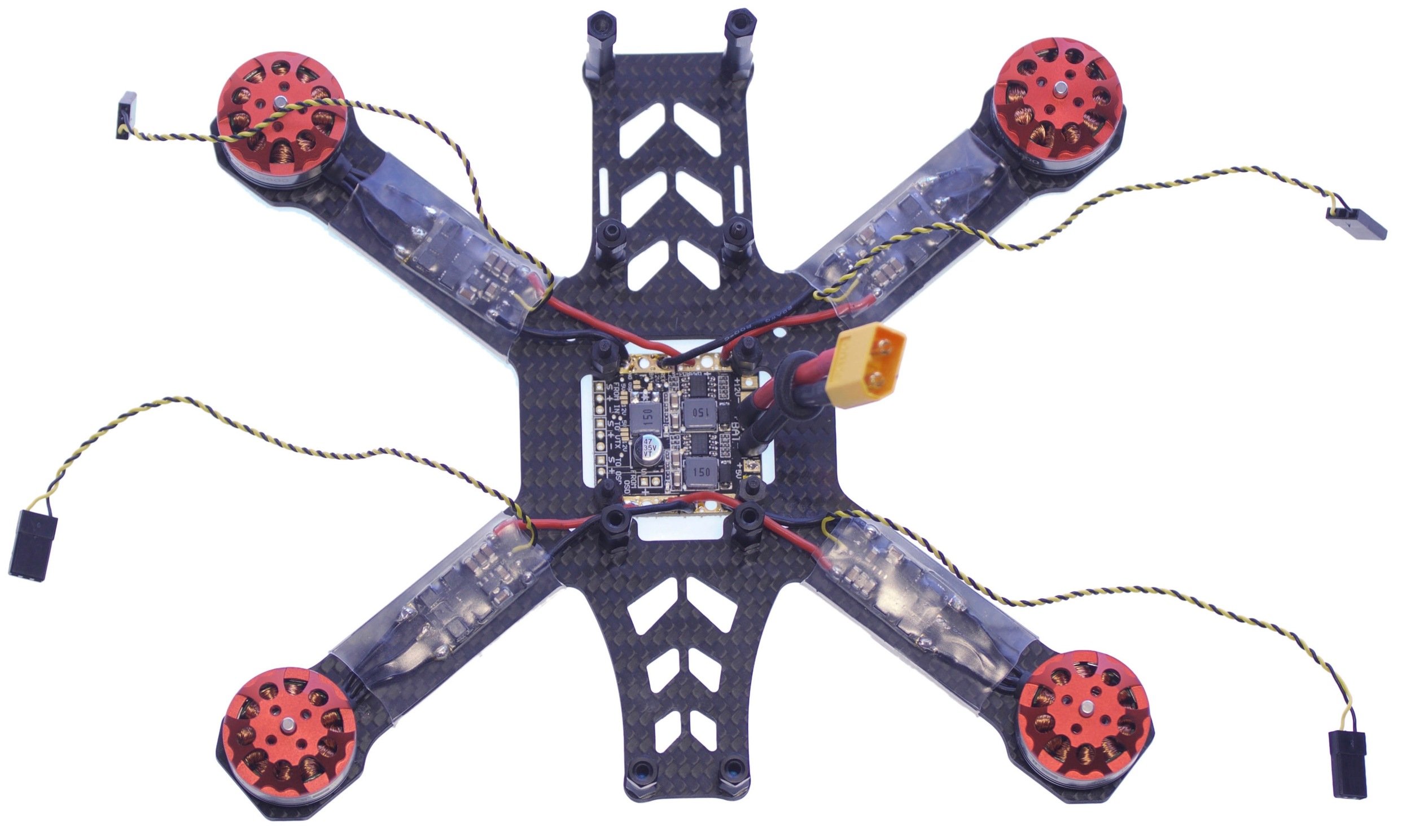
Because this is our first Drone racing builds. We did have a few requirements going in. We wanted a rock solid frame while that can take a licking and keep on kicking while still keeping weight down. A smaller footprint is also important, as we want to be able to fly in and out of things, but at the same time, we don’t want it to be too small causing it to become a difficult build.


After some research, we found Catalyst MachineWorks Speed Addict 210-R FPV Racing Frame fit our needs. With a 4mm thick carbon fiber frame weighing in at 102 grams and a footprint of 210mm rotor to rotor, it nailed our needs. However, it didn’t stop there, the frame is well thought out. With mounts for all your antenna needs and enough hardware to accommodate anything you throw at it.
Catalyst Mashineworks staff is very knowledgeable and eager to help. We received our frame which came in a standard plastic bag. Inside the main parts were separated in their own bags. I would have liked to have the small hardware segregated into smaller bags, as I had to spend time separating and organize them before testing fitting.
Carbon fiber parts were very clean. Unlike many other companies where you want to wash them right away. The edges were not super sharp, but I felt I should file them down a bit to ensure no wires are cut due to vibrations. I used a file and went along all the inside and outside edges of the frame and made sure to clean the parts after I was
Using the assembly manual supplied online HERE the test fit went very well. There was a bit of figuring out which screws are which, but after organizing them first it was fine. The tolerances of parts were great and everything fit perfectly.
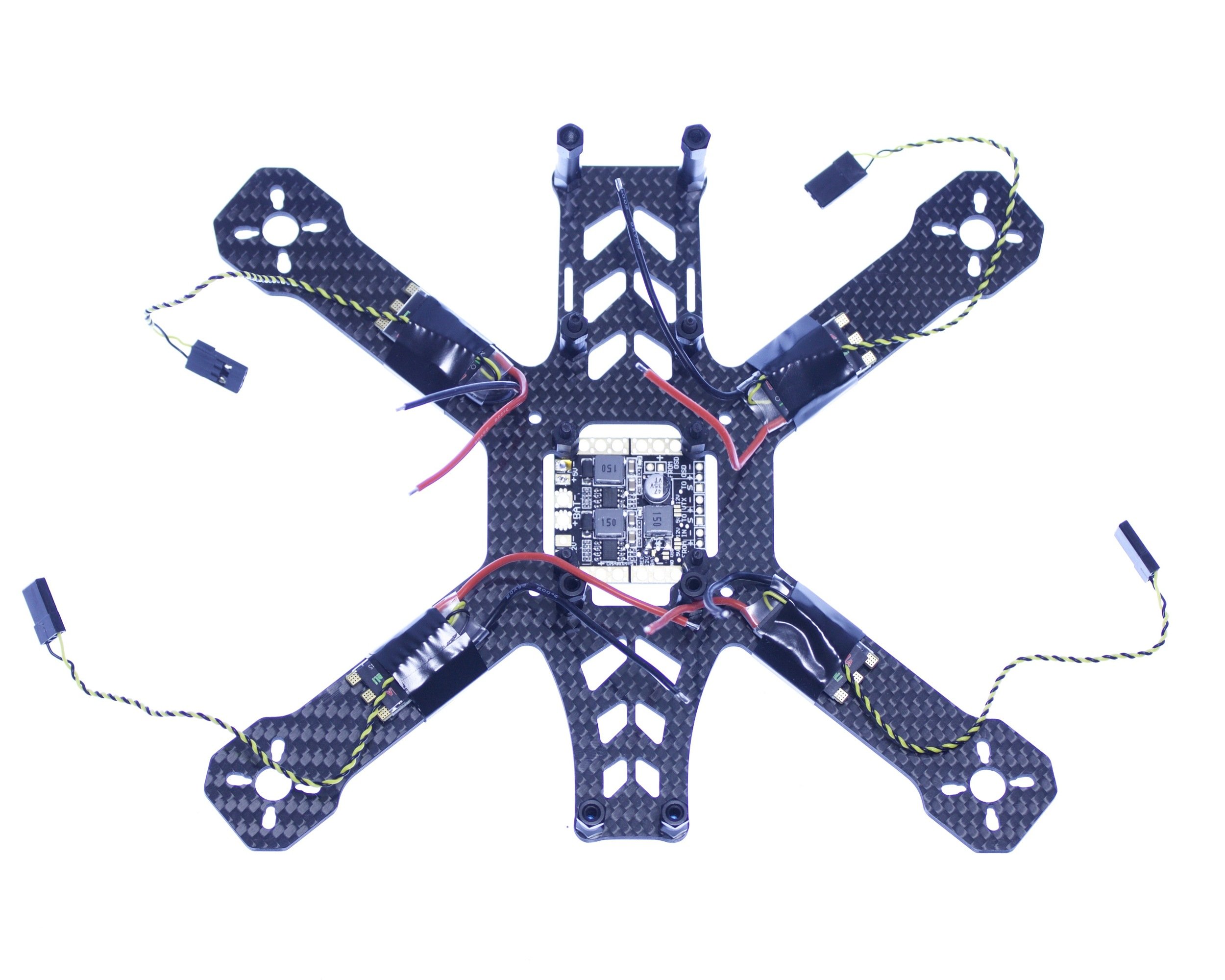
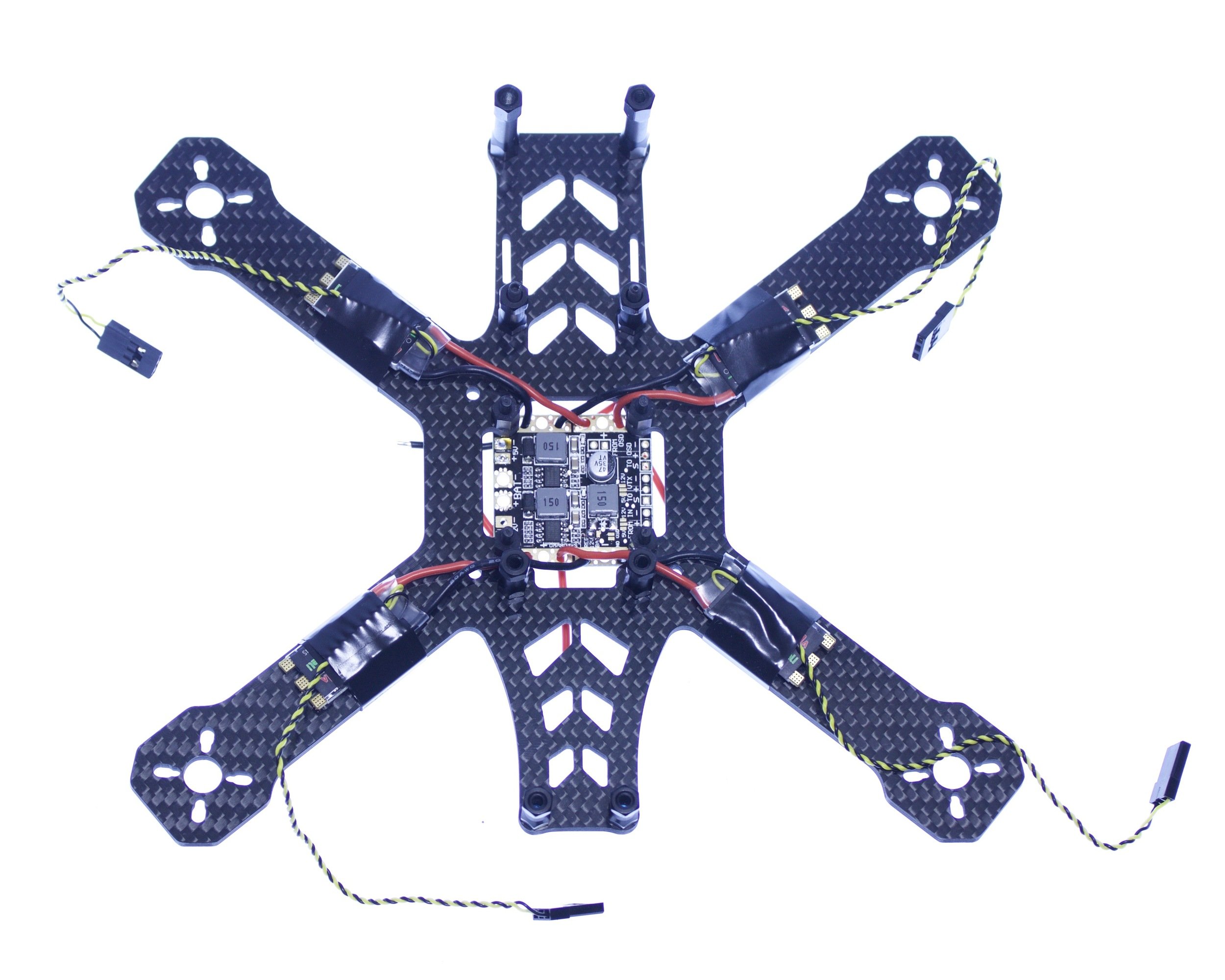
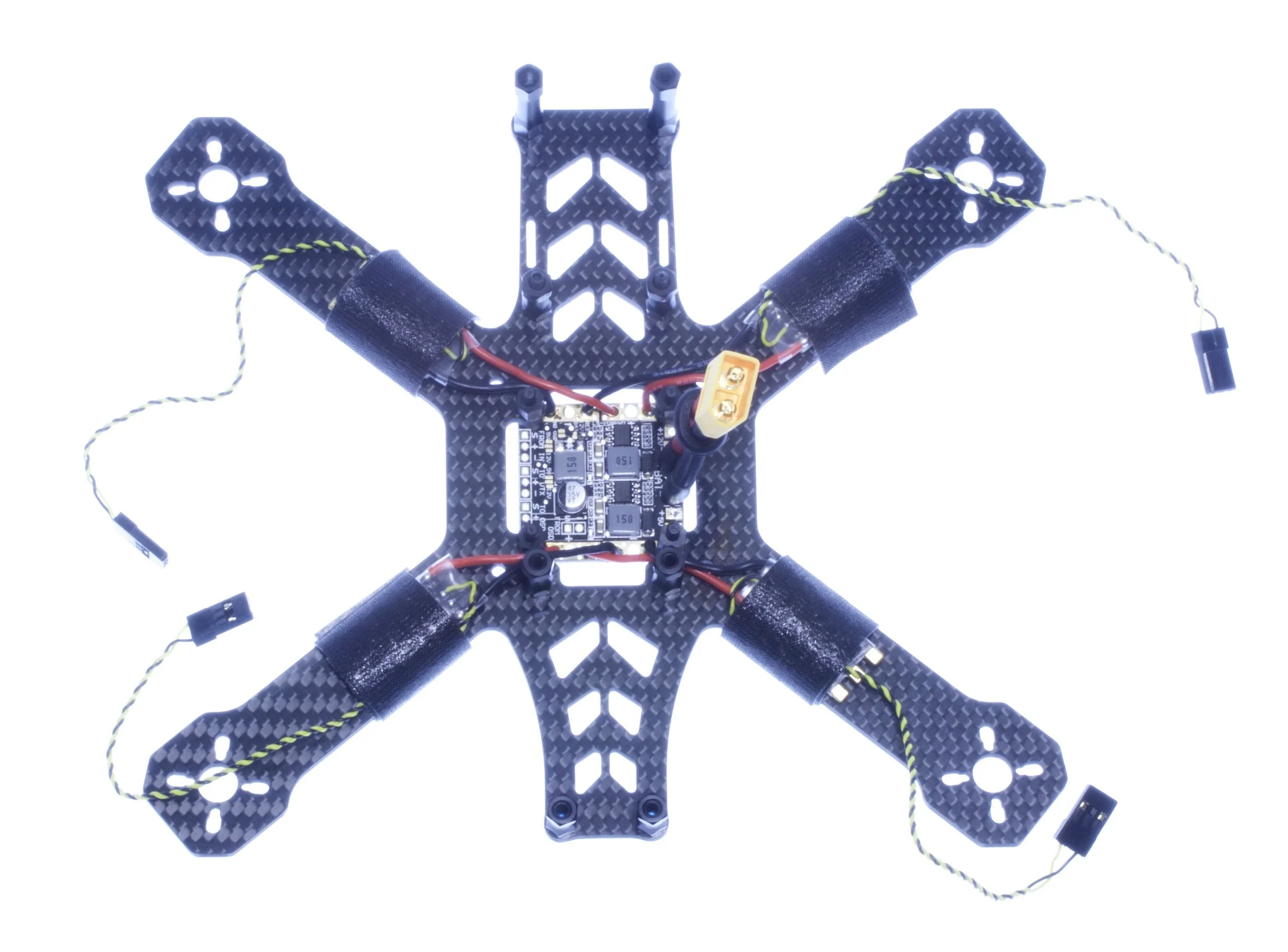
Power distribution board (PDB)
A PDB or Power Distribution Board is defined as a component of an electricity supply system that divides electrical power feed to subsidiary circuits
These little boards are meant to help keep things neat by giving you a single place to distribute power from. Some of the more advanced PDB’s also help to keep power clean with features like step downs and power filters.
We decided on Catalyst Mashineworks FPV Power Distribution Board. It packed the punch and features we need and the pass through wire holes is a nice touch with the 210 frame.
Electronic Speed Controller (ESC)
An ESC or electronic speed controller is defined as an electronic circuit with the purpose to vary an electronic motor’s speed, direction and braking.
Determining what kind of ESC’s you will need will be dependent on the motor, propellers and the number of cell batteries you will be using.
If we are looking at using a 4 cell batteries that put our max voltage at 16.8, and if we factor in GemFan 5030 propellers giving us a trust around 786g at full throttle we would be sitting around 16amps. Our DYS XM 20A speed controllers would give us an overhead of about 3amps.
Now if we would have gone with some 5045 propellers it would have provided us with more thrust at around 889g but it would push our 20amp speed controllers to its limits at 100% throttle sitting around 20.4amps. We need that overhead, we don’t want to overheat or burn out our ESC’s
Calculating required Thrust
While lots of racers will just throw together the fastest motor while keeping their build light, it’s still good to have a basic understanding of how it all comes together.

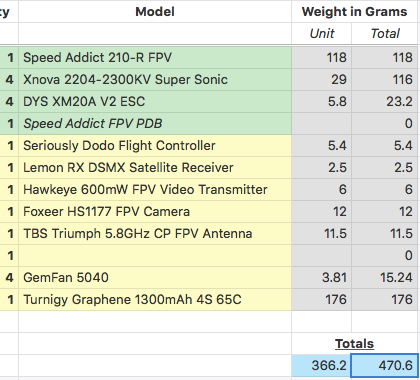
Click to view spreadsheet
The basic rule of thumb is that the combined motor/propeller combinations should be able to generate twice the flying weight in thrust, which will provide more than enough thrust and a nice safety margin.
If you already know your estimated goal weight by either weighing all the parts you do have in addition to gathering up the weight of parts you don’t have from online documentation, you're off to a good start.
I kept track of my all my parts and weight within a spreadsheet. This will aid me to on calculations down the road.
The basic equation goes something like this: (2x(total weight + weight of object))x.2+(total weight + weight of object)
(2(470.60 + 0 ))x.2+(470.60 + 0) = Total Thrust: 1,129.44
1,129.44 / 4 Trust per motor: 480
Using our equation for finding our minimum thrust needs we now know we are looking for a motor / propeller configuration with a thirst output of over 480 to maintain a good hover.
Brushless Motors
A Brushless Motor uses a permanent external magnet rotor with multiple driving coils. These coils are activated in phases one after another.



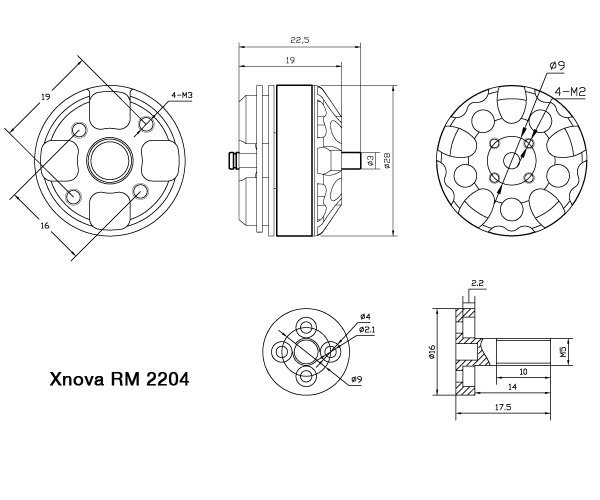
You should be able to find information about the power, thrust, and rpm from either the seller or manufacturer of the motor’s data sheet.
Brushless motors are rated in kV per RPM (K=RPM, v=per volt).
Datasheets show peak Prop/motor thrust tests done at 100% throttle on a test stand. In real world scenario you very rarely actually reach full throttle, peak thrust, and max amps. If anything you only hit those levels for very short bursts. Keep in mind some of that thrust is lost against the frame and any material under the props.
With that said we have already gone through how to calculate thrust (above). There are also some other considerations to keep in mind when choosing a motor. Like the voltage, watt’s, Efficiency and how many cell batteries you intend using. 3’s, 4’s?
I've read a good analogy recently at scarLiang on the correlation between motor efficiency and Cycling.
Cycling at lower gears you're able to cycle faster but it’s harder to peddle. However, if your head uphill, and it gets steeper, you will eventually reach a point where peddling because too hard and you are slowing down all together. This is where you lose efficiency.
The same applies to brushless motors, the higher efficiency the better. A 70% efficient motor produces 70% power and 30% heat. A 90% efficient motor produces 90% power and 10% heat.
To wrap up with less efficient motors your wasting power (flight time) and getting less full thrust throttle. This also impacts response time of spinning up or down to stabilize your drone.
We know that we need a minimum of 282g per motor to hover. However, were looking for speed here so the more the better. We need to consider our 20a ESC and 4S Lipo batteries. We chose to go with the Xnova’s RM2204-2600KV with 5040 props. Specs show in a perfect world 1250g thrust with 28.6 watts of power at 100% throttle. The max watts could be little concerning since our ESC are rated at 20a continues and 25 peak. However, that's at 16.8 volts were going to be around 14v with a 4S battery and you will rarely push 100% throttle, these drones just move too fast to stay there for any period of time.
Wires, connectors and current
When building your drone don’t overlook the impertinence of having the correct wires and connectors.
For the most part, we go with silicone wire, because of its flexibility. But we need to choose the right gauge and connectors so that will support the current we are passing through it. The last thing we want is to melt our PDB and or crash our drone.
General List of common gauges.
- 12AWG Wire - 100A
- 14AWG Wire - 80A
- 16AWG Wire - 50A
- 18AWG Wire - 30A
- 20AWG Wire - 20A
- 22AWG Wire - 10A
General List of common Connectors
- JST connector47 - up to 5A
- 2mm bullet connectors - up to 20 Amps
- 3.5mm bullet connectors - up to 40 Amps
- XT60 connectors29 - up to 60 Amps
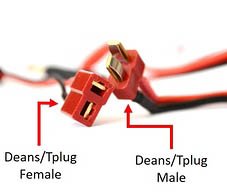
- Deans / T-Plug9 - up to 60 Amps
- EC3 connector32 - up to 60 Amps
- 4mm bullet connectors - up to 70 Amps
- EC5 connectors53 - up to 120 Amps
- 6mm bullet connectors - up to 120 Amps
- 8mm bullet connectors - up to 200 Amps


Build Gallery